Obstacle Avoidance Beginner¶
Activity 3 of 5 · Beginner
What This Activity Is About¶
The drone is placed in an environment with obstacles. You write if/else rules that read the drone's depth camera regions and decide which direction to fly. Your code runs live on the drone the moment you click Start Avoidance. No programming experience is required; only if/else statements are supported.
Learning Goals¶
- Understand how depth camera region readings are used to make decisions
- Write if/else rules that keep the drone moving while avoiding collisions
- Get a collision-free run (score 900 or above earns the No Collision badge)
Page Layout¶
| Area | What is there |
|---|---|
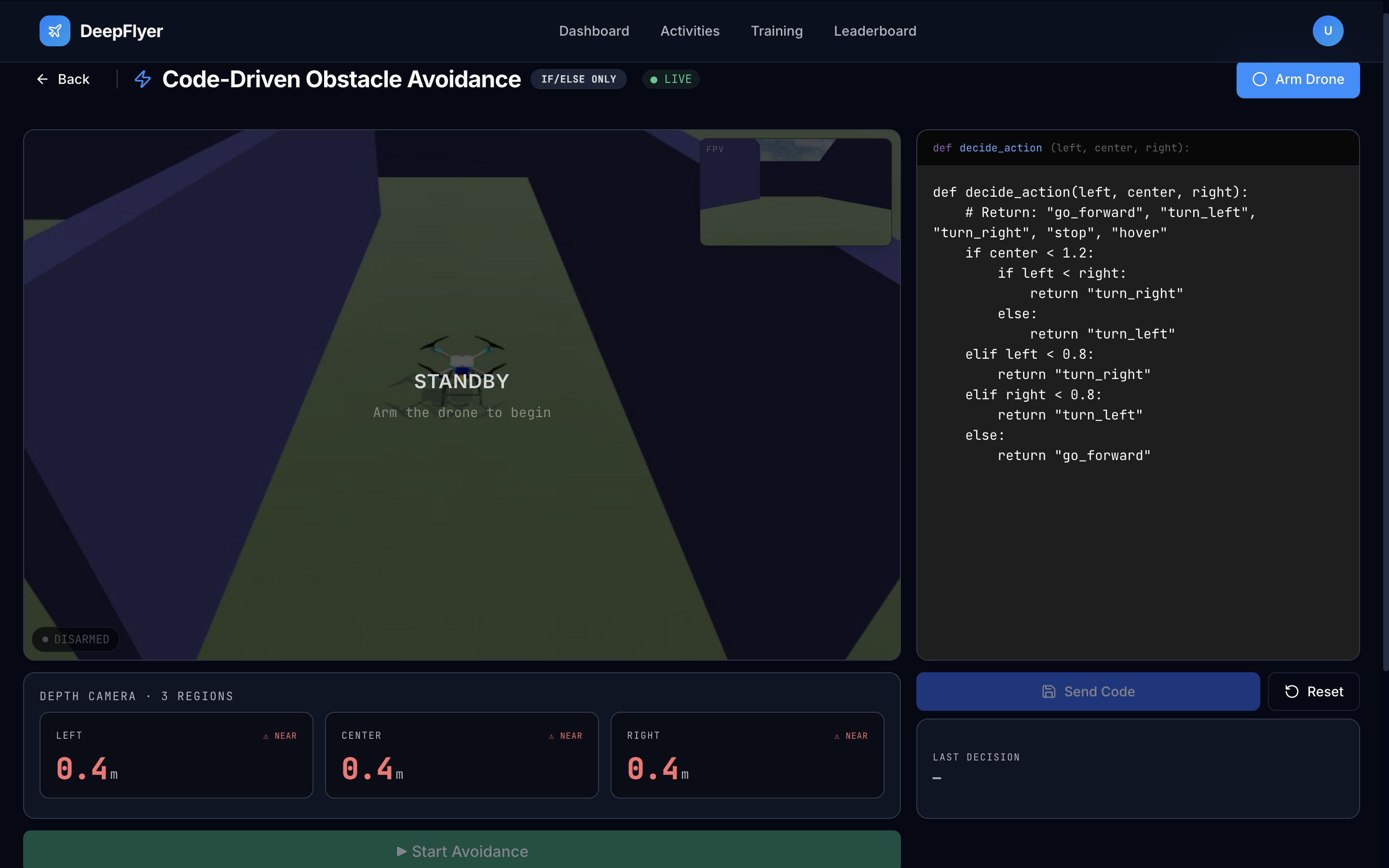
| Top bar | Activity name, IF/ELSE ONLY badge, status dot, ARM button |
| Right | Code editor with Deploy and Reset buttons |
| Left | Live drone camera feed |
| Right, bottom | Last Decision indicator |
| Left, middle | Depth camera region readings (left, centre, right) |
| Left, bottom | Logs |
Step-by-Step¶
Step 1: Wait for Connection, Then Wait a Bit More¶
Check the status dot. Wait for ● LIVE, then wait an additional 1 to 2 minutes before arming. The simulation environment continues loading after the WebSocket connects.
Known issue
Arming immediately after LIVE appears may not work. Give it 1 to 2 minutes first. This will be fixed in a future update.
Step 2: Read the Default Logic¶
The code editor opens with a working example already loaded. Read through it before making any changes so you understand the structure.
This tells the drone:
- If something is within 0.8 m directly ahead, turn right
- If something is within 0.8 m to the left, turn left
- Otherwise keep moving forward
If/else only
The code editor accepts only IF, ELSE IF, and ELSE statements. Loops and functions are not supported. This is intentional so the activity stays focused on decision logic.
Step 3: Arm the Drone¶
Click ARM. The drone takes off to a fixed hover height and waits.
Step 4: Click Start Avoidance¶
Click Start Avoidance. This activates the avoidance system and immediately sends whatever logic is currently in the editor to the drone.
Logic is sent automatically when you click Start Avoidance
You do not need a separate Deploy step after clicking Start Avoidance. The code in the editor is pushed to the drone the moment you press the button.
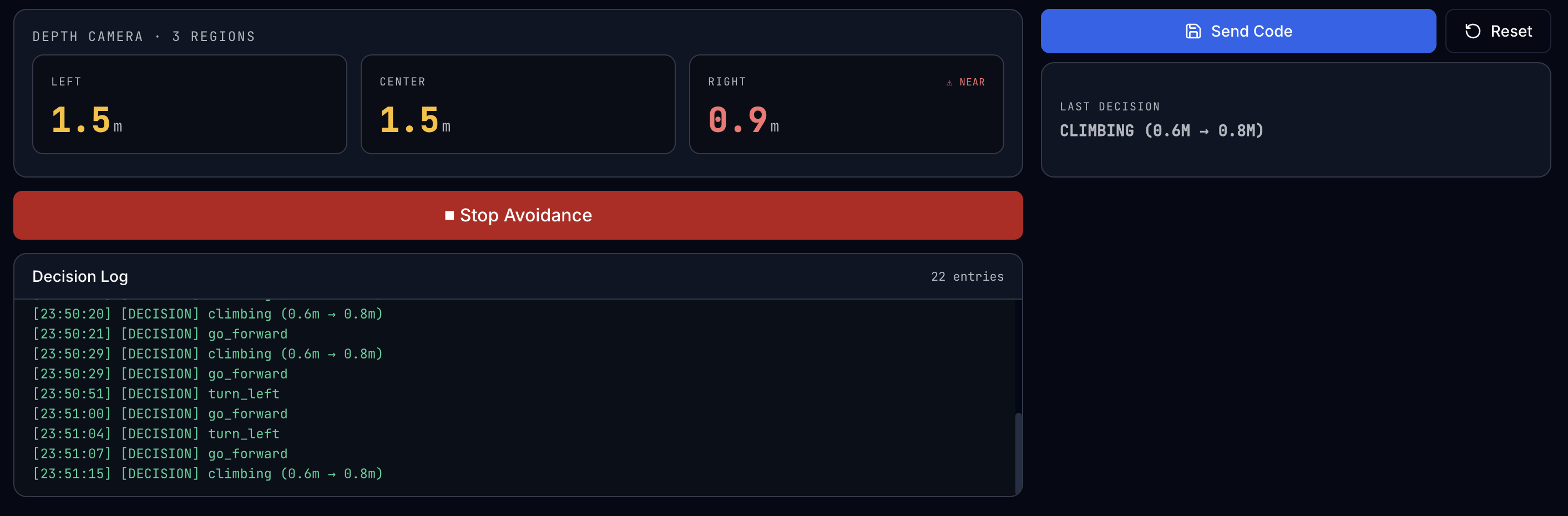
Watch the Last Decision panel on the right. It updates in real time to show which rule is currently firing (for example, TURN RIGHT or MOVE FORWARD).
Step 5: Update Logic While Running¶
If you edit your code after the drone is already running, click Deploy Logic to push the updated rules to the drone without stopping the session. The Last Decision panel will reflect the new rules immediately.
Step 6: Watch and Adjust¶
Observe the drone navigating. If it gets stuck or crashes:
- Click DISARM
- Edit the logic in the code editor
- Click ARM again, then Start Avoidance again
You can iterate as many times as you need. There is no penalty for adjusting your logic between runs.
Step 7: Reset to Default¶
Click Reset to Default if you want to go back to the original example code and start fresh.
Step 8: Complete a Clean Run¶
Get the drone through the obstacle course without a collision. A score of 900 or above earns the No Collision badge.
Depth Camera Regions¶
The drone uses a depth camera that is divided into three horizontal regions. Each region gives the distance in metres to the nearest obstacle within that field of view.
| Variable | Camera region | Range |
|---|---|---|
distance_left |
Left region of the depth camera | 0.1 m and above |
distance_front |
Centre region of the depth camera | 0.1 m and above |
distance_right |
Right region of the depth camera | 0.1 m and above |
When a value drops below your threshold, there is an obstacle close within that region. There is no rear-facing sensor; the drone cannot detect obstacles behind it.
Available Commands¶
| Command | What the drone does |
|---|---|
MOVE_FORWARD |
Fly forward at a fixed speed |
TURN_LEFT |
Yaw left (rotate anti-clockwise) |
TURN_RIGHT |
Yaw right (rotate clockwise) |
STOP |
Hover in place |
No MOVE_BACKWARD
There is no rear-facing depth camera region, so there is no sensor data to drive backward movement safely. Use TURN_LEFT or TURN_RIGHT to escape tight spots instead.
Logic Examples¶
Works in open corridors. Gets stuck in dead ends.
Handles most layouts. Good starting point.
Common Problems¶
| Problem | Cause | Fix |
|---|---|---|
| Drone keeps spinning in circles | No MOVE_FORWARD in the else clause | Add a final ELSE MOVE_FORWARD |
| Clips side walls while moving forward | No side sensor checks | Add rules for distance_left and distance_right |
| Crashes before turning | Threshold too low (under 0.5 m) | Raise thresholds to 0.8-1.2 m |
| Logic does nothing after Start Avoidance | Drone not armed before clicking Start Avoidance | Arm first, then click Start Avoidance |
Up Next¶
Activity 4: PID Tuning - adjust the nine controller gains that govern how precisely the drone tracks a flight path.